
虚拟验证与自动化赛道建模
道路本身 就是目标
虚拟验证的重要性与日俱增,例如在开发过程中测试和验证驾驶辅助系统或联网驾驶功能,确保安全无虞。这离不开保时捷工程公司运用自主开发的端到端工具链,为客户精心创建的路线模型。这背后的过程十分复杂,而常规地图数据远远无法满足需要。

“任何通过仿真 手段验证的功能 都需要用到路线 模型,即道路及其 周围环境的数字 孪生模型。”
蒂勒·卡罗琳·鲁普
保时捷工程公司仿真主管
在新款保时捷 Cayenne 于去年 4 月亮相之前,其原型车总共行驶了 400 万公里的测试里程。这还只是在真实道路和越野赛道上行驶的里程,不包括仿真测试:目前,车辆数字模型在计算机上行驶的里程是真车实际测试里程的 1,000多倍。工程师会为车辆创建数字孪生模型,借助该模型在合成式或混合式测试台架(SiL、HiL、ViL)上进行仿真环境虚拟试驾,以验证其性能,尤其是针对现实生活中很少出现,或无法在现实生活中测试的危险情况:例如,如果弯道后面有一头野猪,自适应巡航控制系统会如何反应?
为了验证驾驶辅助系统和高度自动化驾驶功能,确保安全无虞,必须就千变万化、危急程度或高或低的“边角案例”(Corner Case) 进行充分演练。因此,有一种资源变得越发重要:虚拟道路和环境。保时捷工程公司仿真主管蒂勒·卡罗琳·鲁普 (TilleKaroline Rupp) 解释说:“任何通过仿真手段验证的功能都需要用到路线模型,即道路及其周围环境的数字孪生模型。”过去,这些路线通常由人工创.建,但这种方式无法满足日益增长的需求——毕竟,为了实现自动驾驶,车辆需要数十亿公里的测试里程。“实现高度自动化至关重要。”鲁普表示。保时捷工程公司自主开发了端到端工具链,利用各种原始数据创建虚拟测试路线,几乎无需人工干预。
路线建模的基础数据来自供应商提供的高分辨率地图,或者保时捷工程公司通过 JUPITER 测试车辆自主进行的试驾(JUPITER 是 Joint User Personalized Integrated Testing and Engineering Resource 的缩写,意为“联合用户个性化集成测试和工程资源”)。Google 地图等公共服务提供的地图不适合用于路线建模。负责路线建模的开发工程师托比亚斯·瓦茨尔 (Tobias Watzl) 表示:“我们有时需要精确到毫米级的车道和道路宽度,以及三维横向坡度信息。”由于各国的数据情况各不相同,有时需要立足当地开展工作。例如,中国对采集路线数据有特别的法规约束。凭借驻上海和北京的团队,保时捷工程公司可以在现场承担项目,并始终与其他地点的专家通力合作。
逐步构建路线
第一步是从地图数据中推导出道路的逻辑模型。该模型使用数学公式(主要是多项式方程)描述道路走向,类似于道路施工指南。逻辑道路模型以 ASAM OpenDRIVE® 文件格式保存,该格式由标准化组织 ASAM e. V.(自动化和测量系统标准化协会)管理并持续开发完善。
第二步,创建道路的三维模型——即不仅可以在屏幕上查看,还可以结合传感器模型实现交互的可视化形式。该虚拟测试路线可以任意修改、可以添加汇入口,也可以创建首尾相接的路线。此外还可以选择不以现实路线为蓝本的通用路线,团队将根据所测试的驾驶功能予以调整,使其符合验证需求。例如,如果要通过算法来识别交通标志,就会在沿线设置许多不同的标志。工程师也可以模拟真实路线,例如从斯图加特到慕尼黑的 A8 高速公路。这称为地理参考路线,如果要测试的功能使用内部地图,就需要使用此类路线。
3D 模型最初仅限于道路本身,但为了优化基于摄像头的功能(如车道检测),整条数字化路线必须看起来像真的一样。因此,工程师需要为其打造虚拟的周围环境。保时捷工程公司已将电影行业使用的三维图形软件 Houdini 集成到工作流中,用于生成逼真的沿途树木或房屋等景物。道路沿线物体的位置信息主要来自开放地图服务 OpenStreet-Map (OSM)。
创建逼真的数字道路绝非易事。瓦茨尔介绍说:“假设所有输入数据都准确无误,约十公里的道路需要一小时的计算时间。”工程师要在两方面之间权衡取舍:路线模型需要足够细致,以便能可靠验证相应的驾驶功能;另一方面又不能太庞大,否则可能会对算力提出极高的要求。例如,为了确保仿真顺利运行,程序会略去远处不重要的物体,或者将其外观大大简化。

“我们有时需要精 确到毫米级的车 道和道路宽度, 以及三维横向坡 度信息。”
托比亚斯·瓦茨尔
保时捷工程公司开发工程师
开发自动化工具链
尽可能提高自动化程度,对于高效路线建模至关重要。正因如此,保时捷工程公司国际化团队自主开发了端到端工具链:从逻辑路线数据到最终生成的包括周边环境在内的三维模型,所有步骤均为自动完成。这就需要极高的数字智能水平:假设逻辑路线模型中没有任何坡度,但地面高程数据却有 70 米的高度差,那么算法就应当识别到此处有一条隧道,并在三维模型中添加合适的隧道管。
同样重要的还有数据质量保证,以及让数据无需重大调整即可通用于多种仿真环境。鲁普强调说:“我们会从语义上检查数据的可驾驶性、可导入性以及标准合规性。”例如,程序应当自动识别到因测量误差导致的道路几何形状跳变。除了在相应的仿真环境中进行通过性测试之外,团队还采用了 CARIAD 开发的质检工具。它可以检查 ASAM OpenDRIVE® 文件是否符合标准,能否在所需的仿真环境中顺利使用。
保时捷工程公司与 CARIAD 和 ASAM 共同启动了一项计划,旨在实现标准互换性,便于进行验证。这个计划催生出了“ASAM Quality Checker”项目,各个合作伙伴将通力协作,共同开发一个验证框架,作为提高标准互换性的重要基础。ASAM 首席执行官 (CEO) 马吕斯·杜普伊 (Marius Dupuis)和首席技术官 (CTO) 本·恩格尔 (Ben Engel) 强调说:“只有凭借统一的解释和实施的标准,才能实现可扩展的仿真解决方案。没有标准,我们将无法描述世界。”用户也对此表示赞同:“除了标准之外,我们还需要共同确定质量要求,以便将现有的最佳工具组合成可靠的工具链。”CARIAD 仿真与测试产品负责人马塞尔·朗格 (Marcel Langer) 表示。在根据仿真环境调整模型时,保时捷工程公司可以充分发挥自身优势。鲁普强调说:“我们非常清楚对仿真的要求,因为它是由我们自主开发的,并且我们已经将其成功应用于客户项目中。”例如,可以利用仿真来模拟相应的环境和周围的交通情况,通过硬件在环系统,在虚拟车辆中测试真实控制单元的功能。这样可以减少对实际测试的需求。保时捷工程公司采用了许多这样的硬件在环 (HiL) 系统。

“我们有时需要 精确到毫米级 的车道和道路 宽度,以及三维 横向坡度信息。”
托比亚斯·瓦茨尔
保时捷工程公司开发工程师
下一步:天气和人工智能
随着我们向高度自动化驾驶不断迈进,未来的虚拟测试路线必须越来越面面俱到、细致入微。瓦茨尔说:“尚待发掘的潜力不可估量。”举一个例子:目前,虚拟交通空间里始终是怡人的夏日——车道总是洁净、干燥。瓦茨尔表示:“今后,我们可能会推出冬季版本,让路边堆满积雪并覆盖车道标记。”重点在于,程序不仅要将积雪、树叶堆或水坑等障碍物可视化,更要正确呈现它们的物理特性。这是因为,不同传感器的检测方式截然不同,包括光学手段和其他物理手段,因此驾驶辅助系统的反应也会有所差异。
为了进一步提高仿真的细致程度,保时捷工程公司还充分利用其内部的人工智能专业知识。鲁普举例说:“人工智能可以自动分析卫星图像,提供关于景观或建筑物的信息。”此外,还可以利用人工智能技术从视频中自动提取交通标志等元素。这有助于让路线模型更快地适合另一个国家/地区的情况。
1
小时
大约 1 小时 这是 10 公里虚拟路线所 需的计算时间。
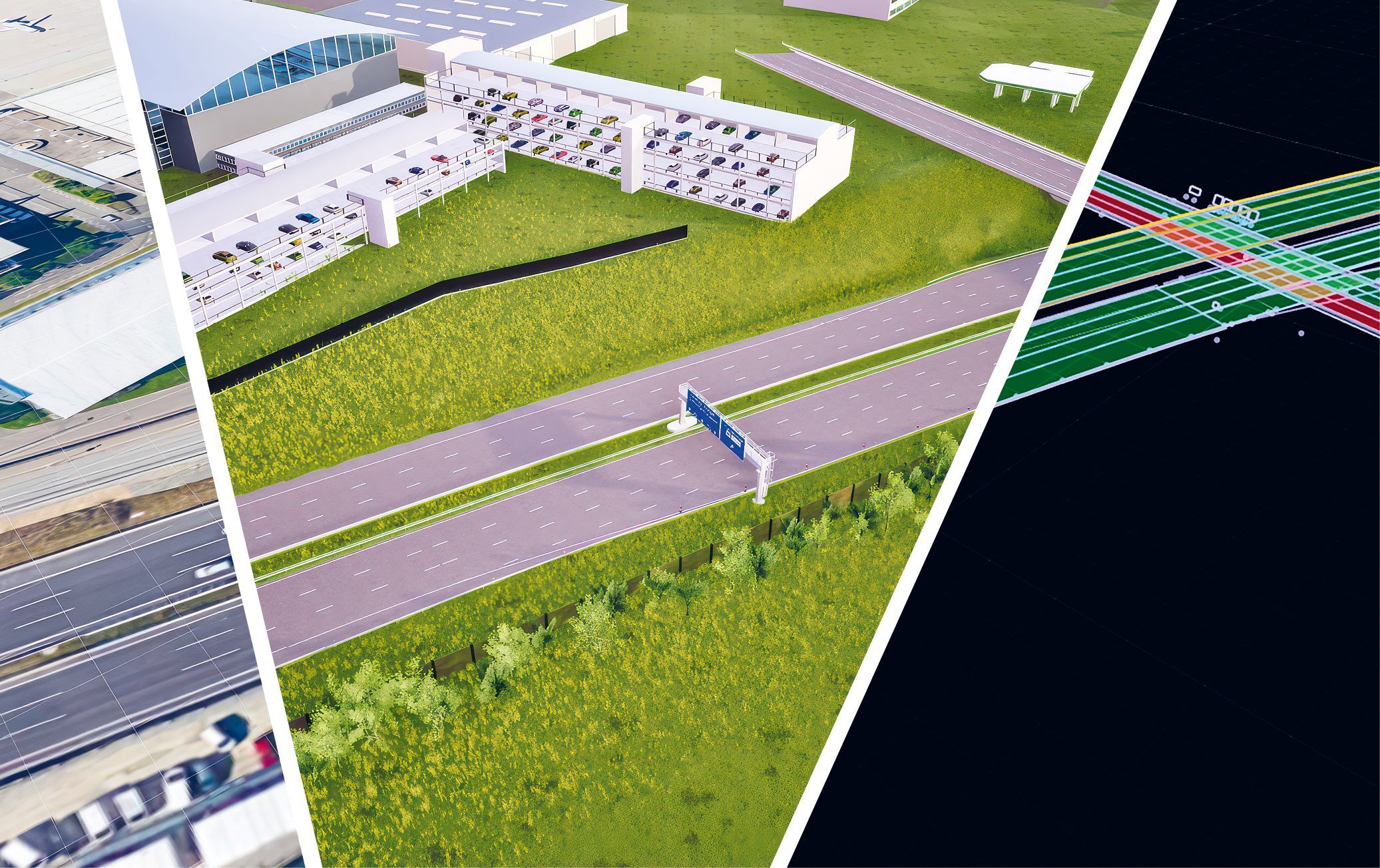
从现实到仿真:路线建模的两大组成部分
路线模型所反映的通常是真实存在的场景(左侧为航拍照片)。这些模型由两个在几何形状和内容上都相互匹配的部分组成:一个部分是路网与物体的逻辑数学描述(右图),另一个部分是可行驶区域和周围环境的三维模型(中图)。路线模型是在合成式和混合式测试台架(SiL、HiL、ViL)上进行虚拟验证和开发过程中配套测试的关键环节。
信息
本文首次发表于《保时捷工程杂志》2024年第1期。
文字:Constantin Gillies
版权:本文中发布的所有图片、视频和音频文件均版权保护。未经保时捷工程书面许可,不得部分或全部复制。欲了解更多信息,请联系我们。
联系方式
您有问题或想了解更多信息吗?请联系我们:info@porsche-engineering.de